Robotics research
LeRobot, SmolVLA, and SO-101 Evaluation
Research tooling and model evaluation for robotic-arm autonomy, with a focus on making training, deployment, and experiment review less repetitive and more measurable.
What I built
Lab workflow tooling
I built a Visualizer inside a LeRobot GUI Wrapper so the lab could reduce repetitive command generation and inspect datasets, deployment videos, model folders, metadata, history, and experiment runs from one interface.
The wrapper sits on top of an existing LeRobot installation instead of replacing it. It helps with hardware bring-up, teleoperation, dataset recording, training, deployment, replay, history review, and experiment comparison.
See More ->
Model work
Training and evaluation
I trained and evaluated multiple robotic policies for pick-and-place tasks on SO-101 arms. The model families I worked with include SmolVLA, ACT, GR00T, and PI0.5-style workflows.
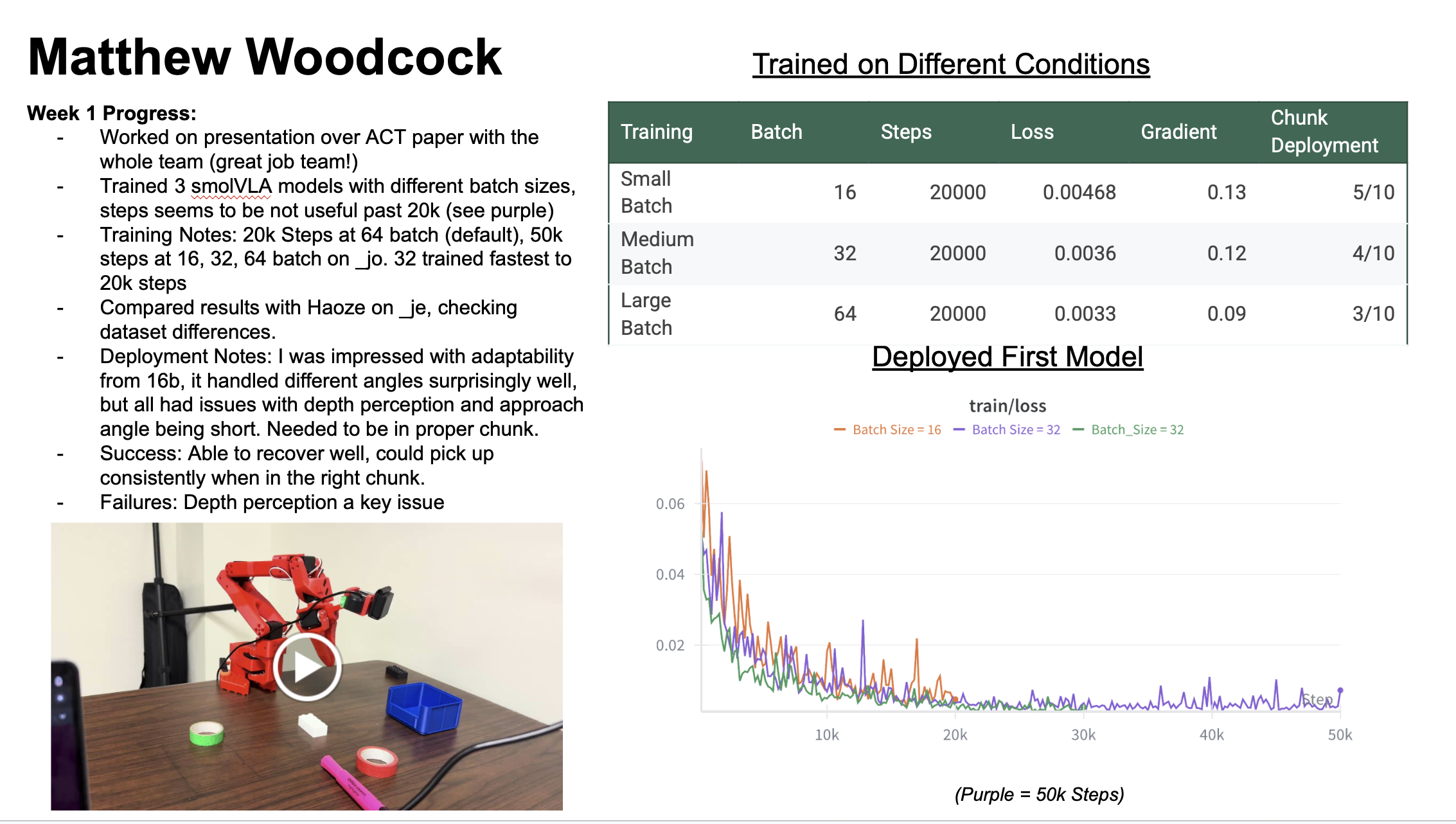
Training ran on an NVIDIA A100 cluster, and the research work focused on developing environments and training conditions that improved real hardware performance instead of only producing offline metrics. Early SmolVLA experiments showed that lower offline loss did not directly translate to better deployment; the 16-batch run had the strongest chunk deployment result in the initial comparison.
Hardware
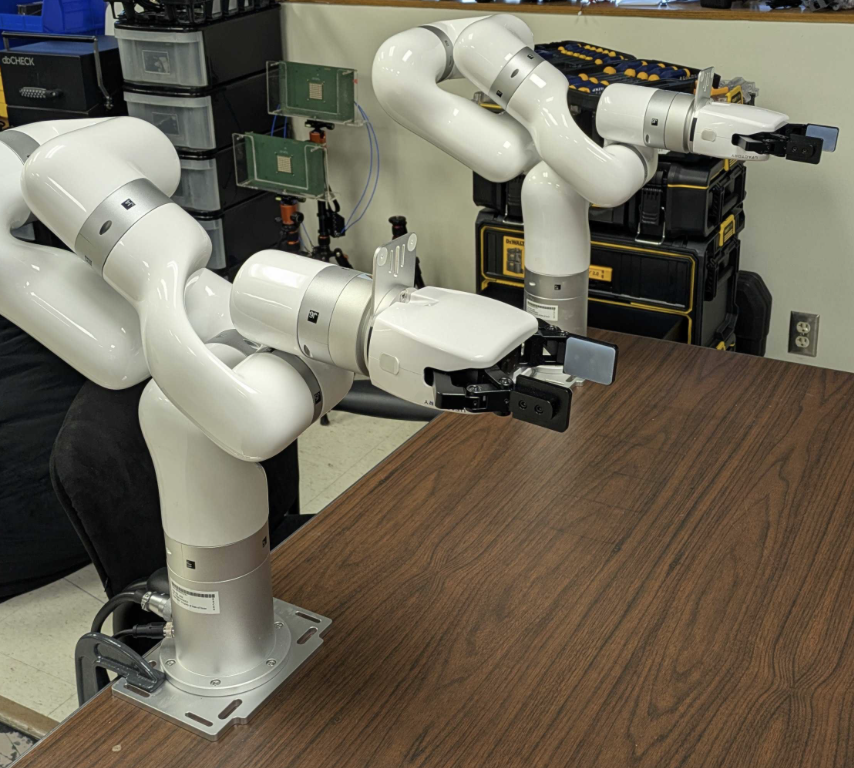
SO-101 robotic arms
The work used 6-DOF SO-101 leader/follower robotic-arm setups for data collection and policy deployment. That meant dealing with calibration, camera setup, action chunking, dataset quality, and the difference between a model that trains and a model that completes the task on hardware.
Batch comparison
SmolVLA deployment notes
| Condition |
Batch |
Steps |
Loss |
Gradient |
Chunk result |
| Small batch |
16 |
20,000 |
0.00468 |
0.13 |
5/10 |
| Medium batch |
32 |
20,000 |
0.0036 |
0.12 |
4/10 |
| Large batch |
64 |
20,000 |
0.0033 |
0.09 |
3/10 |
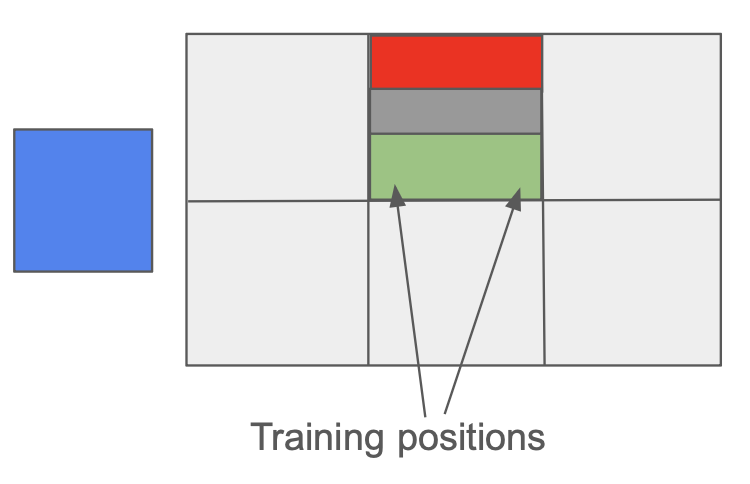
The first useful deployment note was practical: the model could recover well and pick consistently when the object started in the right region, but depth perception and approach angle were recurring failure modes.
This table is included as an example of the experiment-tracking format and preliminary deployment notes. Later runs produced better results; these numbers are not meant to represent the final outcome of the research.